世界を舞台に活躍するワールドクラスのテクノロジー
MRMC 「Robotic POD & Nikon Z9 Camera is Used To Capture World Class Football Stars」( & Nikon Z9 Camera is Used To Capture World Class Football Stars)。
世界最高のサッカー選手の新たなアングルを捉える
世界でも有数の大舞台で、MRMC 、その多才さと最先端技術を再び披露した。AFP通信(フランス通信社)とのコラボレーションで、この多才な Robotic PODニコンZ9カメラを使って、世界で最も有名なサッカー選手を撮影した。

Robotic POD ニコンZ9
新しいZ100-400レンズの特徴
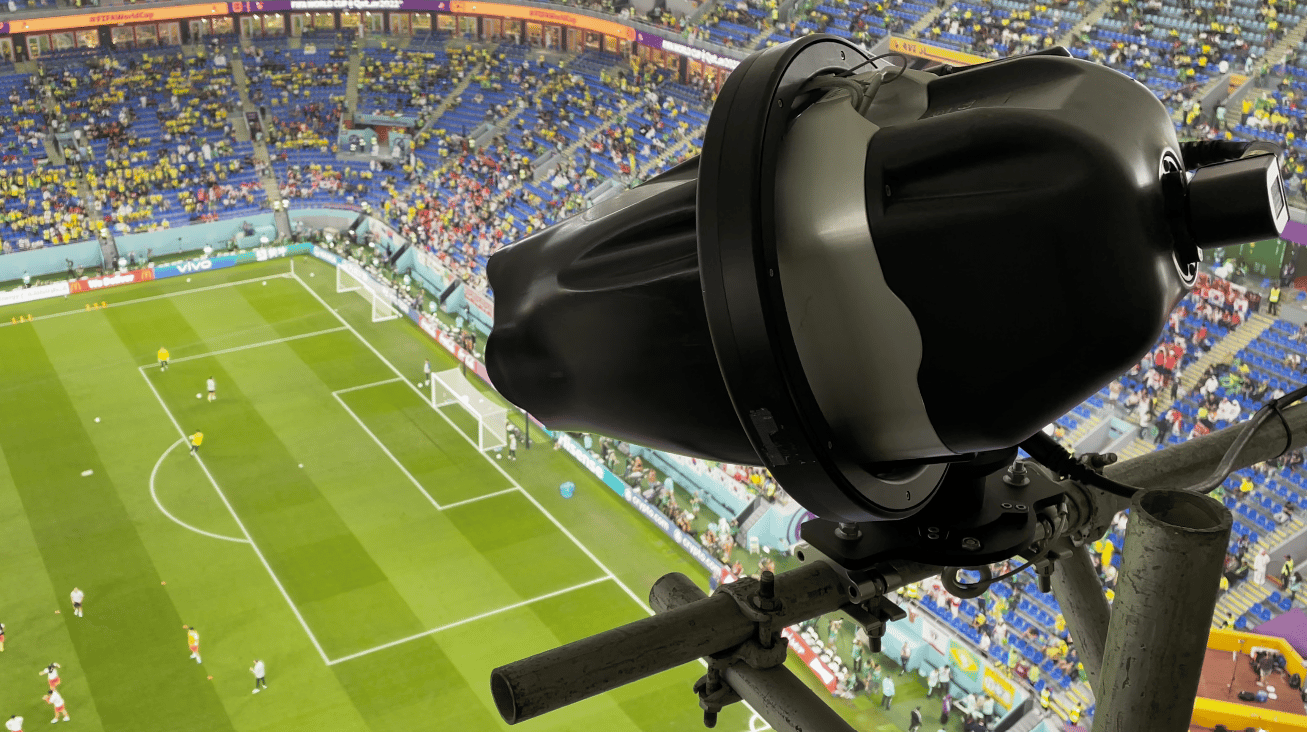
Robotic POD 、ニコンのフラッグシップ・ミラーレス・カメラZ9と最新のZ100-400レンズが使用された。しかし、このrobotic POD のこれまでの展開と異なる点は、使用されたカメラではなく、robotic POD を操作するソフトウェアにある。スタジアムには、最大5台の独立したPODが設置された。各PODは、コーナーポイント、ピッチの中心、ゴール裏の2つの位置を使用してピッチにキャリブレーションされる。複雑な数学と三角法を使って、PODはスタジアム内の正確な位置を判断することができる。その後、MHC (マルチヘッドコントローラー)ソフトウェアのシンプルなユーザーインターフェイスが、カメラの位置と正確な視野をバーチャルに表示します。
Robotic POD 、ニコンのフラッグシップ・ミラーレス・カメラZ9と最新のZ100-400レンズが使用された。しかし、このrobotic POD のこれまでの展開と異なる点は、使用されたカメラではなく、robotic POD を操作するソフトウェアにある。スタジアムには、最大5台の独立したPODが設置された。各PODは、コーナーポイント、ピッチの中心、ゴール裏の2つの位置を使用してピッチにキャリブレーションされる。複雑な数学と三角法を使って、PODはスタジアム内の正確な位置を判断することができる。その後、MHC (マルチヘッドコントローラー)ソフトウェアのシンプルなユーザーインターフェイスが、カメラの位置と正確な視野をバーチャルに表示します。

Polymotion 選手入場
トラック>フォロー>キャプチャ
Polymotion Playerは MRMC 、ロボットカメラの動きを完全に自動化するソフトウェア・ソリューションである。リアルタイムの選手追跡データがPolymotion のソフトウェアに入力され、アルゴリズムを使って即座に選手の位置するカメラを正確に動かすコマンドに変換される。Polymotion Playerは数年前からMRMC 、世界中の多くのスタジアムで使用され、broadcast レベルのビデオ映像を提供してきた。昨年、このソフトウェアはさらに改良され、写真用途にも使用できるようになった。
Polymotion Playerは MRMC 、ロボットカメラの動きを完全に自動化するソフトウェア・ソリューションである。リアルタイムの選手追跡データがPolymotion のソフトウェアに入力され、アルゴリズムを使って即座に選手の位置するカメラを正確に動かすコマンドに変換される。Polymotion Playerは数年前からMRMC 、世界中の多くのスタジアムで使用され、broadcast レベルのビデオ映像を提供してきた。昨年、このソフトウェアはさらに改良され、写真用途にも使用できるようになった。
ビデオであれスチルであれ、一人の選手を試合中ずっと追いかけ続けることは、有人のカメラマンが90分間ずっとできることではありません。スポーツ写真では、予期せぬ出来事や見過ごされがちな出来事が、撮影されればイベント全体のハイライトになることがある。1枚の写真、1つのクリップが、撮影されたすべての写真をまとめたのと同じくらい貴重なものになることがあります。だからこそ、Robotic POD 、そのような瞬間をとらえる最高の機会を与えてくれるのです。
MRMC
ポジションデータによる選手の特定
スポッター画面の使い方
次に、重要な選手データが表示されます。正確な選手のポジションとジャージ番号は、「スポッター画面」と呼ばれる同じ画面に表示される。青と赤のドットは各チームのピッチ上の選手を表し、彼らがピッチを動き回るとドットも動く。最後に、オペレーターが番号を選ぶだけで、ロボットが動き出す。一瞬にしてカメラはターゲットをロックオンし、残りの試合中、歩こうがボールを追って走ろうが、ターゲットの中心を見失うことなく追い続ける。さらに、ボールの追跡も可能で、最高速度180°/秒のロボットはボールについていくのに何の問題もない。
次に、重要な選手データが表示されます。正確な選手のポジションとジャージ番号は、「スポッター画面」と呼ばれる同じ画面に表示される。青と赤のドットは各チームのピッチ上の選手を表し、彼らがピッチを動き回るとドットも動く。最後に、オペレーターが番号を選ぶだけで、ロボットが動き出す。一瞬にしてカメラはターゲットをロックオンし、残りの試合中、歩こうがボールを追って走ろうが、ターゲットの中心を見失うことなく追い続ける。さらに、ボールの追跡も可能で、最高速度180°/秒のロボットはボールについていくのに何の問題もない。
オペレーターの創造性を高める
オペレーターに残されたことは、アクションが展開されるたびに、カメラを別々に、あるいは同期させてトリガーすることだけだ。このテクノロジーは、新しいタイプの写真撮影の扉を開いた。有人カメラがアクションだけに集中している間、他の選手は何をしているのか?ゴールやファウルがあったときの反応や表情は?さまざまな角度から見ると、そのアクションはどのように見えるのか?例えば、ファウルやアウトの疑いのあるボールがあるにもかかわらず、ある選手が視界を遮っている場合、同じ選手を4つの角度から追跡するとどうなるだろうか?これで、試合中のアクションをほぼ3Dで見ることができます。