激突:スパイダーマン対グリーン・ゴブリン
ケーススタディ
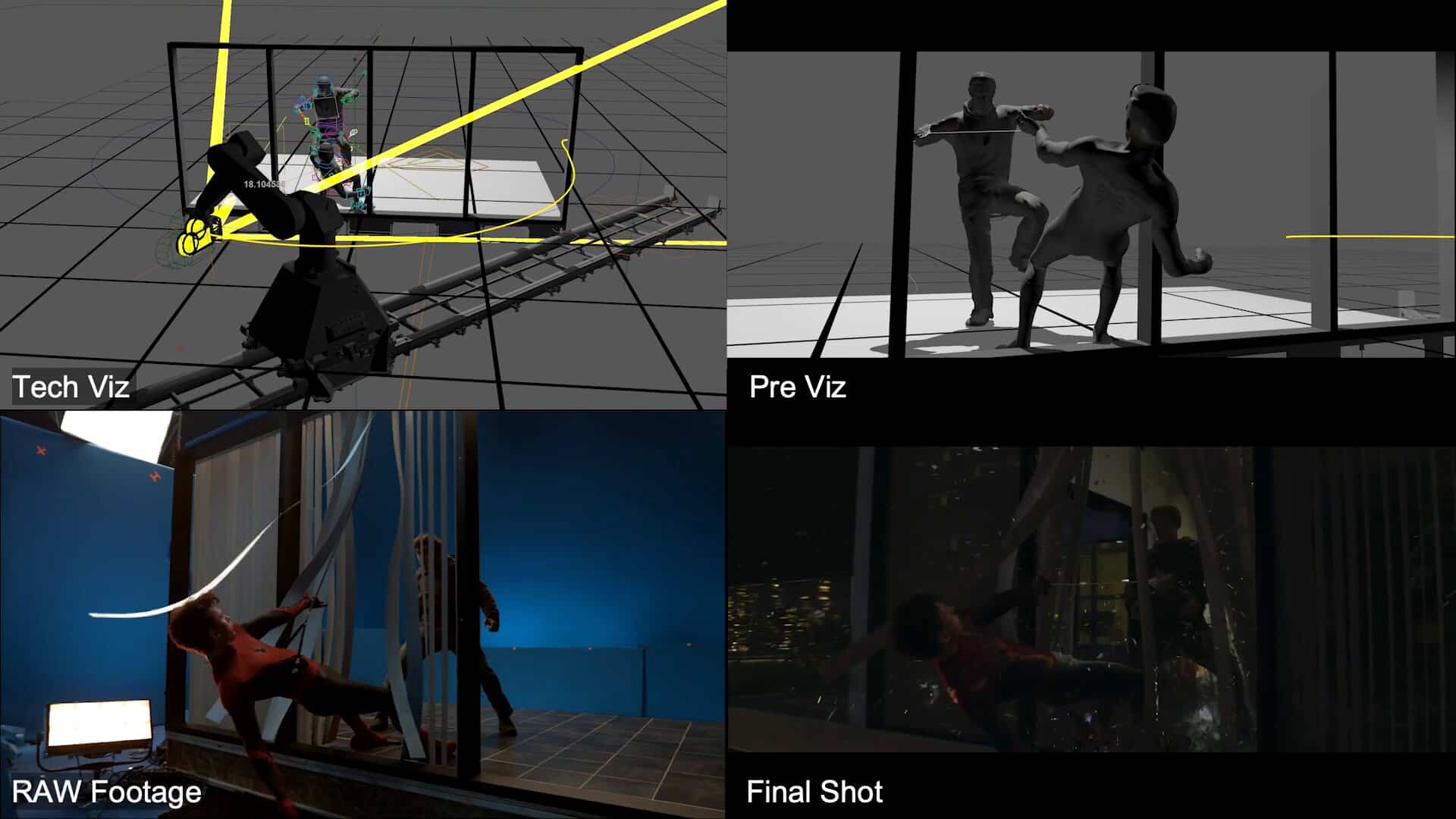
コリン・マイケル・クインは、『スパイダーマン:ノー・ウェイ・ホーム』で、グリーン・ゴブリンがスパイダーマンを窓から殴り飛ばすという重要なシークエンスで、重要な役割を果たした。3メートルのトラックでBolt Cinebot 、コリンはパンチをスローモーションで撮影した後、トム・ホランドの背後でBolt を高速で周回させ、強烈で視覚的に見事なシークエンスを実現した。
コリン・マイケル・クインは、『スパイダーマン:ノー・ウェイ・ホーム』で、グリーン・ゴブリンがスパイダーマンを窓から殴り飛ばすという重要なシークエンスで、重要な役割を果たした。3メートルのトラックでBolt Cinebot 、コリンはパンチをスローモーションで撮影した後、トム・ホランドの背後でBolt を高速で周回させ、強烈で視覚的に見事なショットを撮影した。
プロジェクト概要
スパイダーマン:ノー・ウェイ・ホーム』の制作段階で、著名なBolt オペレーターのコリン・マイケル・クインは、スパイダーマンとグリーン・ゴブリンの激しい対決を含む重要なシークエンスの形成に重要な役割を果たした。
さらに Bolt Cinebotコリンは、グリーン・ゴブリンがスパイダーマンを殴って窓を突き破り、カメラが建物の内側から外側へと素早くアクションを追う様子を捉えることを狙った。
戦闘が進むにつれて、Bolt システムは、セットの周囲で起こっている出来事の急速な連続をシームレスにキャプチャし、登場人物のアクションや環境との相互作用を紹介し、1つの壮大なアクション満載の高速ショットでクライマックスを迎える必要があった!
Bolt システムの高速性は撮影に不可欠だった。これはおそらく、私たちのロボットがこれまでで最も速くコースを走ったことになる。どのテイクを撮ってもみんな大満足で、あそこではパーティーのエネルギーが充満していた。
クインMoCo
チャレンジ
ダイナミックな軌道操作ということで、クライアントは当初、カーブした軌道をスピード感たっぷりに使いたいと考えていた。つまりコリンは、直線的な長さの軌道とBolt のアームの動きを使って、可能な限り円形に近い動きをする方法を考え出さなければならなかった。
もうひとつの挑戦は、プリビジュアライゼーションのスローモーションの側面と、撮影現場のリアルタイム性を両立させることだった。プリビズには1000fpsのタイムランプがあるため、当日は特別に速くする必要があった。
当初の計画では、プリビジュアライゼーションに忠実であることを目指したが、撮影の要求、特にパンチアクションのタイムランピングと高フレームレートにより、ロボットは望ましい効果を得るためにさらに速く動く必要があった。
ソリューション
Simul8(Maya )のプラグイン(MRMC )を使用して、ColinはDigital Domainのビジュアライゼーション責任者であるScott Meadows(スコット・メドウズ)から提供されたプリビジュアライゼーションファイルをインポートし、Bolt に適応させた。これにより、彼はMarvel Cinematic Universe Studiosのチームに、カーブトラックなしで希望するカメラの動きを実現できることを示すことができた。
Simul8と連携し、Flair 、軸をインポートしてカートに変換する際に重要な役割を果たした。コリンは、編集性を高めるために動きをいくつかのポイントに凝縮し、撮影現場での素早い調整を可能にした。彼は時折、Flair のドロップキー機能を使い、リアルタイムで微調整できるよう、パスに沿って戦略的にキーを配置した。
Boltのスピードと精度を最大化するため、プリビズで設定された以上にカメラの動きを調整し、ポストプロダクションでスーパースローモーション効果を得るために比例して速くなるようにした後、チームは高速アクションのリハーサルに進んだ。
スタントチームとの綿密なプログラミングと練習を経て、トム・ホランドが撮影に参加することになった。驚くべきことに、コリンはわずか2テイクで映画で使用されるショットを撮影し、さらに2つのパスを録画して保存した。トムの撮影の後、参考のために窓ガラスが割れるSFXパスが実行された。その後、HDRIのボールとチャートを使ったパス、クリーンパス、カメラトラッキングのためのスロースケールの動きも撮影された。
この撮影は、Flair motion control 、複雑なシーケンスを計画し、タレントが撮影現場に到着するずっと前に問題を解決する一方で、撮影当日に柔軟に調整できるようにすることの重要性を強調している。
クインMoCo
スパイダーマン:ノー・ウェイ・ホーム』への貢献以来、コリンはジョージア州アトランタを拠点とする自身のプロダクション、クインMoCo(motion control )を設立した。コリンの革新的な仕事について楽しんでいただけたなら、モコの世界で今後予定されているプロジェクトについては、彼のウェブサイトをご覧ください!