捕捉冲突:蜘蛛侠大战绿妖精
案例研究
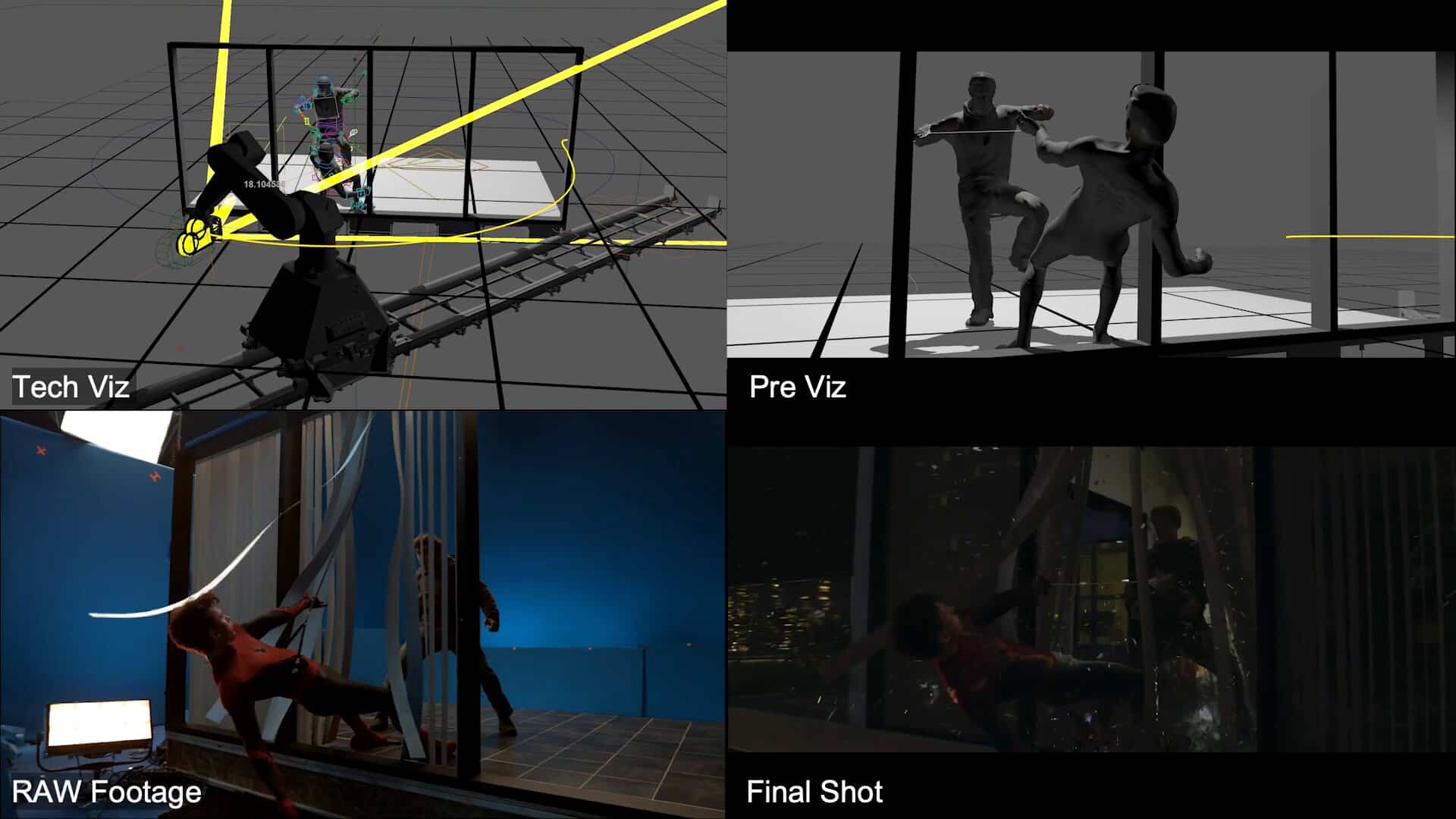
科林-迈克尔-奎恩(Colin Michael Quinn)在《蜘蛛侠:无路可逃》(Spider-Man: No Way Home)中的一个关键片段中发挥了至关重要的作用,绿魔一拳将蜘蛛侠打穿了窗户。科林使用Bolt Cinebot 在三米长的轨道上,负责以慢动作捕捉这一拳,然后在汤姆-霍兰德身后高速环绕Bolt ,完成了一个紧张刺激、视觉震撼的镜头。
科林-迈克尔-奎恩(Colin Michael Quinn)在《蜘蛛侠:无路可逃》(Spider-Man: No Way Home)中的一个关键镜头中发挥了至关重要的作用,在这个镜头中,绿魔一拳将蜘蛛侠打穿了窗户。科林在三米长的轨道上使用Bolt Cinebot ,他的任务是慢动作捕捉这一拳,然后在汤姆-霍兰德身后高速环绕Bolt ,拍摄出一个紧张刺激、视觉震撼的镜头。
项目概述
在《蜘蛛侠:无路可逃》的制作阶段,著名的Bolt 操作员科林-迈克尔-奎恩(Colin Michael Quinn)在塑造蜘蛛侠与绿妖精之间的激烈对决这一关键情节中发挥了关键作用。
利用 Bolt Cinebot科林在三米长的轨道上设置了额外的运动轴,目的是捕捉绿魔一拳打在蜘蛛侠身上,将他从窗户推了出去,同时摄像机从建筑物内部快速跟拍到建筑物外部的动作。
随着战斗的进行,Bolt 系统需要无缝捕捉布景周围发生的一系列事件,展示人物的动作以及他们与环境的互动,最后以一个史诗般的、充满动作的高速镜头结束!
Bolt 系统的高速度是这次拍摄不可或缺的一部分。这可能是我们的机器人在赛道上跑得最快的一次。每个人都对我们的每一次拍摄都非常满意;那里充满了派对的活力。
Quinn MoCo
挑战
作为一个动态轨道动作,客户最初希望使用一个速度很快的弯曲轨道,这意味着科林必须想出一个办法,利用一段直轨道和Bolt 的机械臂动作,使动作尽可能环形。
另一个挑战是如何协调预视的慢动作与现场条件的实时性。预视中有一个 1000fps 的时间斜坡,因此当天的速度必须特别快。
虽然最初计划的目标是紧跟预想,但由于拍摄的要求,特别是打孔动作的时间缩减和高帧率,机器人必须以更快的速度移动才能达到预期效果。
解决方案
Maya 科林使用MRMC 的 Simul8 插件,导入并修改了 Digital Domain 可视化主管 Scott Meadows 为Bolt 提供的预可视化文件。这使他能够向漫威电影宇宙工作室的团队展示,无需曲线轨道也能实现所需的摄像机运动。
Flair 与 Simul8 配合使用,在导入轴并将其转换为车方面发挥了关键作用。科林将运动浓缩为几个关键点,以提高可编辑性,从而在拍摄现场进行快速调整。他偶尔会使用Flair 中的 "下拉按键 "功能,将按键战略性地放置在路径上,以便进行实时微调。
为了最大限度地提高Bolt的速度和精确度,在后期制作过程中,摄制组对摄像机的运动进行了超出预设的调整,以确保其速度与超级慢动作效果成正比,之后,摄制组开始进行高速动作排练。
在与特技团队进行了大量的编程和练习之后,汤姆-霍兰德被请来参加拍摄。值得注意的是,科林只拍摄了两次就捕捉到了电影中使用的镜头,并又录制了两次以作保存。在汤姆的拍摄结束后,又进行了一次以窗玻璃破裂为参考的 SFX 通过。随后,还拍摄了涉及 HDRI 球和图表的镜头、一个干净的镜头和一个用于摄影机跟踪的慢镜头。
这次拍摄凸显了Flair motion control 的重要性,它可以在演员到达拍摄现场之前就规划好复杂的序列并解决任何问题,同时还可以在拍摄当天灵活地进行调整。
荣誉
客户:漫威电影宇宙工作室漫威电影宇宙工作室
视觉特效Digital Domain
Motion Control:Rite Media
Moco Operator:科林-迈克尔-奎恩
幻影技术员贾斯汀-东布罗夫斯基
Bolt 技术员克里斯-赫西
贡献者Quinn MoCo
Quinn MoCo
自从为《蜘蛛侠:无路可逃》做出贡献后,科林在佐治亚州亚特兰大成立了自己的motion control 制作公司Quinn MoCo。如果您喜欢了解科林的创新作品,请访问他的网站,了解 Moco 世界即将推出的更多项目!